第三章 平面连杆结构
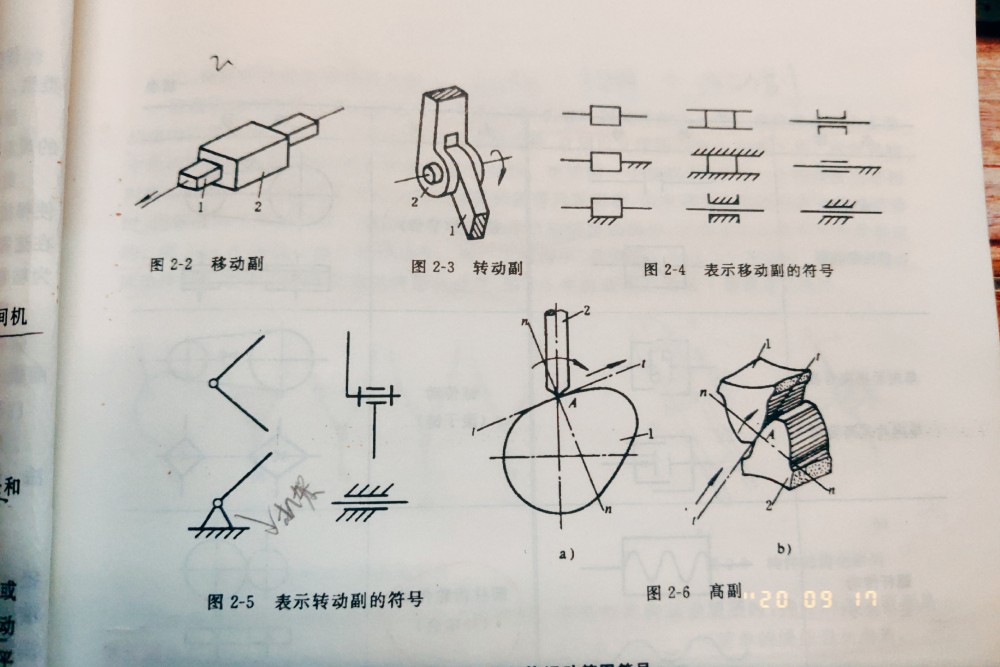
平面连杆机构是由若干构件用低副(转动副、移动副)联接组成的平面机构。
第一节 平面四杆机构的基本类型及其应用
一、铰链四杆机构
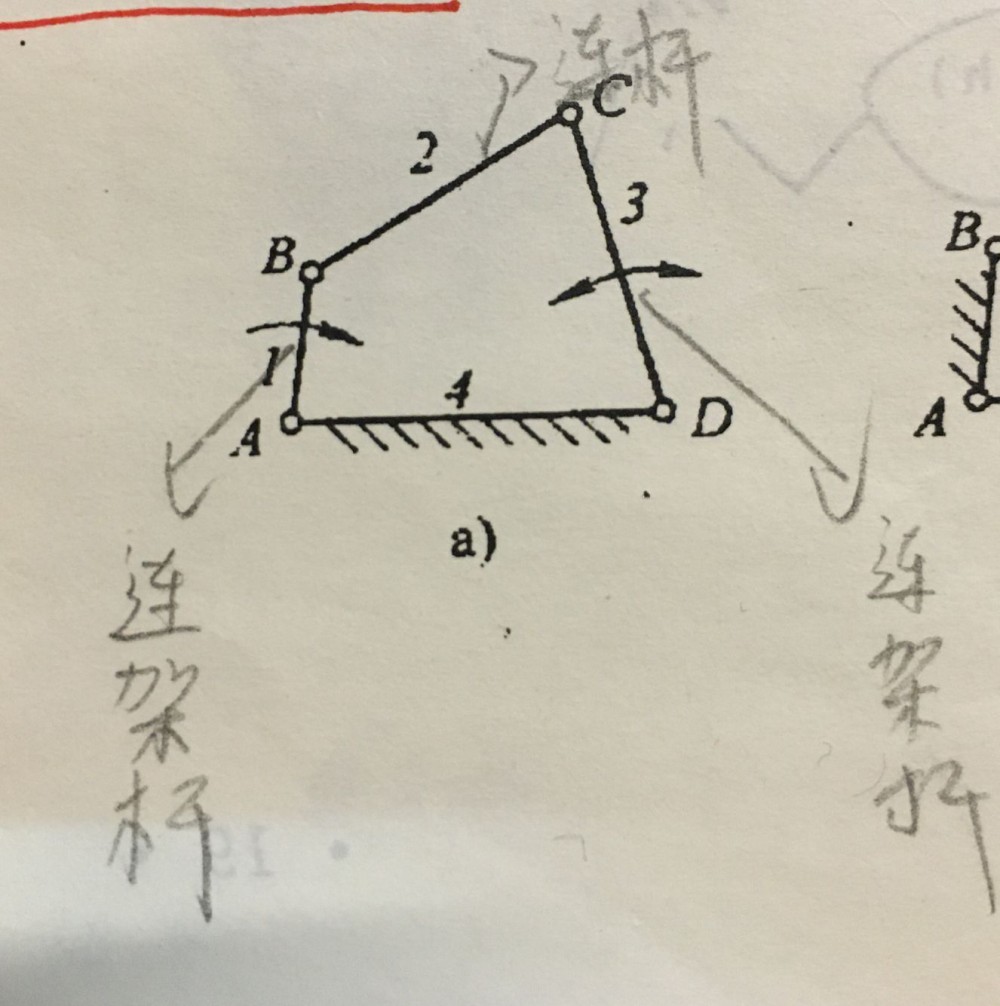
全部用转动副相连的平面四杆机构称为平面铰链四杆机构,简称铰链四杆机构。
与机架用转动副相连接的构件 1 和 3 称为连架杆,不与机架直接相连的构件 2 称为连杆。若组成转动副的两构件能作整周相对转动,则称该转动副为整转副,否则称为摆动副。与机架组成整转副的连架杆称为曲柄,与机架组成摆动副的连架杆称为摇杆。
按照连架杆是曲柄还是摇杆,将铰链四杆机构分为三种基本形式:曲柄摇杆机构、双曲柄机构和双摇杆机构。
1.曲柄摇杆机构
通常 曲柄 为原动件,并作匀速转动;而摇杆为从动件,作变速往复运动。
2.双曲柄机构
可以在主、从动曲柄上错开一定角度再安装一组平行四边形机构,来消除不确定运动状态的问题。
3.双摇杆机构
通过更换机架而得到的机构称为原机构的 倒置结构 。
二、含一个移动副的四杆机构
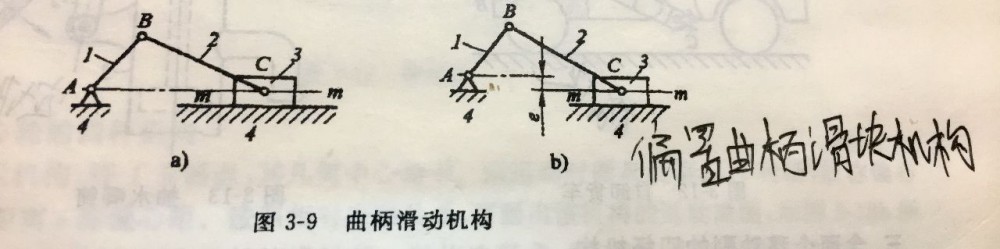
1.曲柄滑块机构
2.导杆机构
3.摇块机构和定块机构
三、含有两个移动副的四杆机构(双滑块机构)
睡着了,这部分不会……
四、具有偏心轮的四杆机构
五、四杆机构的拓展
第二节 平面四杆机构的基本特性
一、铰链四杆机构有整转副的条件
铰链四杆机构有整转副的条件是最短杆与最长杆长度之和小于或等于两杆长度之和。
整转副是由最短杆与其临边组成的。
取最短杆为机架时,机架上有两个整转副,故得双曲柄机构。
取最短杆临边为机架时,机架上只有一个整转副,故得曲柄摇杆机构。
取最短杆的临边为机架时,机架上没有整转副,故得双摇杆机构。
如果铰链四杆机构中的最长杆与最短杆的长度之和大于其余两杆长度之和,则该机构不存在整转副,无论取哪个构件作为机架都只能得到双摇杆机构。
二、急回特性
摇杆在两极限位置的夹角\psi 称为摇杆的摆角。
\theta =180^{\circ }\dfrac{K-1}{K+1}
K=\dfrac{\theta +180^{\circ }}{180^{\circ }-\theta }
其中(\theta \leq 90^{0}) (k\leq 3)
\theta为极位夹角
具有急回特性的机构除了曲柄摇杆机构外,还有偏置曲柄滑块机构和摆动导杆机构(极位夹角等于摆杆摆角)等。
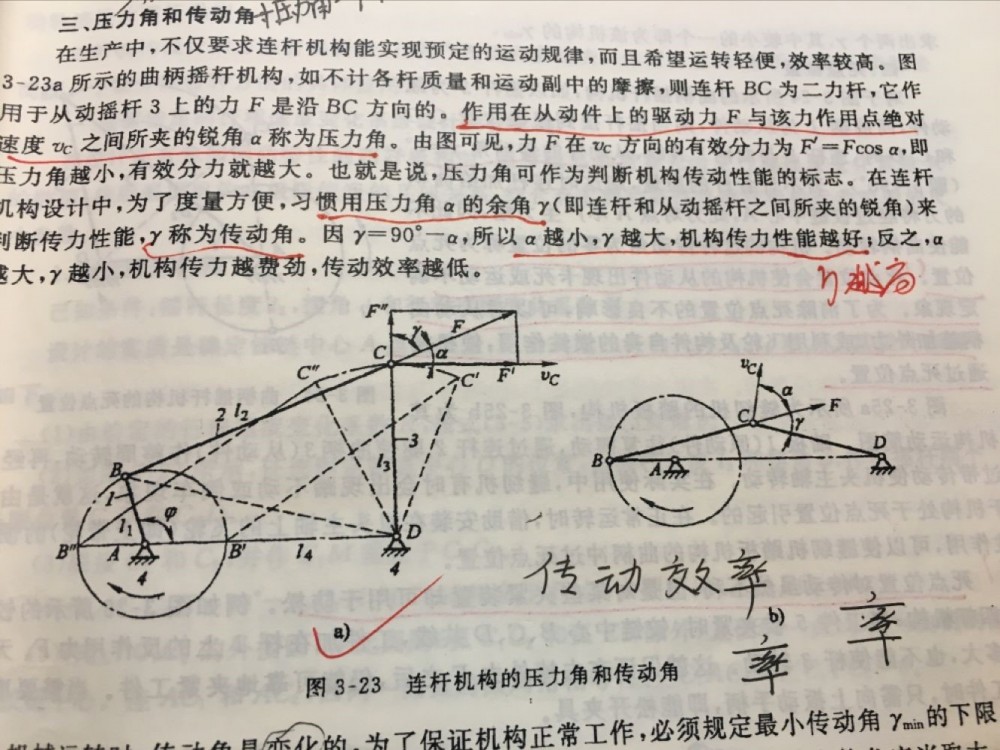
三、压力角和传动角
压力角:力和速度的夹角\alpha。
传动角:压力角的余角\gamma越大,机构传力性能越好。
四、死点位置
机构传动角为零的位置称为死点位置。(可以利用飞轮惯性来避免)
第三节 平面四杆机构的设计